Modeling and Control Team
The purpose of this team is to develop a low-level controller and create a simulation representative of the underwater vehicle. The teams main role is to program the software of the low-level controller which interfaces with an onboard microcontroller and the high-level autonomy decision making. The goal of the simulation is to provide an environment for vision, autonomy and controller code to be tested prior to being loaded on the vehicle. Arduino, Python and ROS are the utilized tools to develop the controller code and simulation.
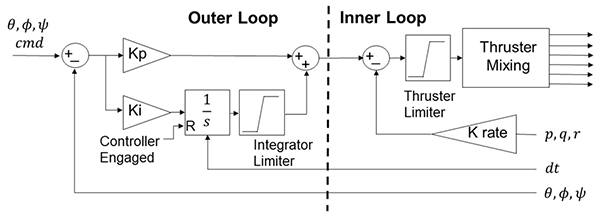
Figure 1. Simplified Block Diagram of Angle Stabilization Controller
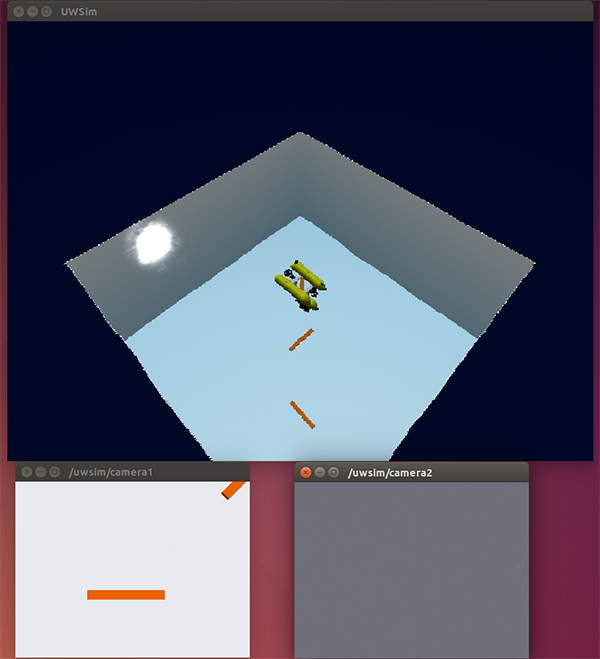
Figure 2. Customized Simulation Environment
![[Photo] Daniel changes controller parameters at the pool during a test on Feb. 24, 2015.](images/MD_4474.jpg)
Daniel changes controller parameters at the pool during a test on Feb. 24, 2015.